
The Making of an Animatronic Dolphin
- Jerry Wang

- Jun 2, 2019
- 6 min read
Updated: Mar 23, 2021

This is the final project in my ME 10 design class. We were collaborating with a local elementary school. We each form teams of five, and collaborate with a randomly assigned elementary school student. The main goal would be to construct a dancing robot that would end up performing on stage. The elementary school students would specify what kind of robot they would want (looks, movements), and we would try to meet their requirements, while they would construct a stage for our robot to dance on.
Design Requirements


The elementary school student we were working with is Allie. Allie wanted a dolphin, and during our interview with her, she gave us more details of her idea. She wanted the dolphin to be able to move its tail, head, mouth, and have some sort of motion that resembles swimming. The dolphin is also to have greenish blue and white parts on its body.
Interpretation
We are starting to conceptualize how exactly those movements would be accomplished. First off, since we would be performing in an atmospheric environment, it is practically impossible to have an actual swimming robot, so we decided to have the dolphin attached to some sort of pole and the pole would be attached to a moving cart to simulate the swimming motion. We also debated what the dolphin would be made of.
Many other teams were going to purchase premade stuffed animals and construct a skeleton to be put inside the plush. We found no plush on the market that meets the requirement, therefore we decided to either use an acrylic cutter to make a polygon shaped dolphin or 3d print one with resources on campus.
Ideas and Sketches
Each team member is then asked to come up with their own designs. My sketches are below













My first design features a tail that is controlled by two servos (we were only given two servos as a constraint); this design allows the tail to be very expressive because the tail has two degrees of freedom, the tail fin would be able to move both vertically and horizontally. The second design has the dolphin's head and tail each controlled by one servo, a much more balanced design. The third design only uses slab construction, as a consideration in case we do not end up with access to a 3d printer. Slab construction allows us to fully build our dolphin with the acrylic cutter which we have full access to in the labs. While the first two designs use a compliant mechanism to accomplish the tail movement, the third takes a more traditional approach and uses pivots to simulate the motion of a tail.
The compliant tail mechanism was inspired by Festo's bionic tripod design. I happened to come across this arm design years ago, and the idea of applying it to the tail just popped into my head. Instead of controlling it with three linear actuators like Festo, we simply need the tail to swing up and down, so it would be controlled by only one servo.

For the elevation mechanism, I originally intended to have the supporting pole go through the dolphin and the dolphin would hang from a string that is routed through the top of the pole. I also came up with a more detailed plan on how the tail of the dolphin with a compliant mechanism would be fabricated, as shown in the sketches.
Final Design

Modeling
With all the details of the dolphin bot worked out, we began modeling.
I worked on the body of the dolphin bot. We are still beginning modelers, and really don't have a clue on how to model a smooth surface like a dolphin using a parametric program like SolidWorks. We managed to find a suitable license-free model online, then I scaled the model to the correct width and size. After all, why do it the hard way? Because the downloaded model does not support features recognition, I had to make a few cuts on the model to create flat surfaces that would allow me to start adding parameters to the model.




Below is the final body assembly by Sebastian and Me.

Jordan, Max, and Slark worked on the cart and post assembly, and below is the render of the final assembly: *tail wire is not shown

Build Time!
Here begins the fun part, the journey to finally completing the project.
We were able to find various 3d printers that were available to use, therefore we decided the body is to be 3d printed due to its difficult geometry to fabricate using other methods while achieving a good result.
The entire robot would be controlled by a single Arduino Teensy. Two motors with gearboxes would be used, one for the drive wheel, the other for the repeating elevation mechanism. The entire movement of the dolphin's body would be controlled by a single servo, which actuates the head's nodding movement and the tail.
The cart and the tail would be constructed with laser-cut acrylic and nuts and bolts.
The supporting pole is to be made of two slip fit PVC pipes, allowing the telescoping action. There is also a sloted key at the bottom of the PVC pies so that the dolphin does not have unwanted rotation.
Finally, the compliant tail would be mostly hollow, it would be made of bike brake cables because they offer very good flexibility while being able to maintain shape when bundled together. Initially, we wanted to cover the tail with cloth, but I decided against it because the hollow tail looks quite cool.
Sebastian and I exported our parts to be printed to STL. We were able to be in touch with a chemical engineering professor and use his printer. Thanks to the convenience of a 3d printer, we were able to get our project in our hands very quickly, thus able to verify that the compliant tail mechanism works quite well. The side of the dolphin is designed to open up to allow easy access to the internals. The side panel is held on by screws.
The head nod movement is controled by the same servo that controls the tail. Ther servo has a fishing wire that connects to the head so that when the tail is down, the head lifts up.








Tail mechanism working:
The rest of the dolphin bot is coming along as well.






Soon enough, were able to finish a working prototype:
We Need a Bigger Dolphin
After the first prototype has been completed, it is becoming apparent that the size of the actual dolphin is quite small compared to the rest of the mechanism. We would be performing on a stage, so after a brief discussion, we agreed that making a bigger dolphin is a necessity and is achievable before the performance.
Sebastian and I went back to SolidWorks to scale everything up by 150%, then downscaling the dimensionally sensitive parts (servo mounts, screw holes). Sebastian was also able to bring his personal printer from home and set it up in my dorm room. We couldn't depend on campus printers any more because the availability and the turnaround time simply does not fit into our time frame. We needed a printer to be printing almost 24 hours a day for our scaled-up parts to be finished with good details, as the performance is only days away.





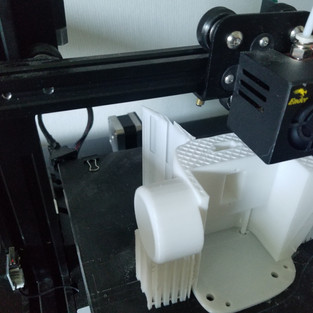




While working with Sebastian's printer, I was beginning to realize the convenience of having one. So far it has been very easy to work with, and the quality of the finish surprised me very much. A 3d printer seemed like quite an effective tool to bring my ideas and designs to life, and I perhaps would get my own printer one day.
After the print has finished, we painted the dolphin to match Allies aesthetic requirements.




The Performance
The kids voted that our robots should dance to Old Town Road, so we all complied. Our dolphin simply moves its tail and nods to the rhythm. Overall, I was quite happy with the result of this project. It was the kind of fun that feels well earned. I was also glad to share a collaborate spirit with such a hardworking group of students, while each one of us demonstrated very creative thinking. Below is a short demonstration of various features of the final dolphin bot and the final performance.


Comments